Motor de articulación robótica planetaria armónica sin bastidor
Motor de articulación armónico
Los motores de articulación con harmonic drive de HONPINE se caracterizan por alta precisión, alto par y gran diámetro de núcleo hueco, y a menudo proporcionan soluciones para aplicaciones en espacios confinados. Se admite la personalización, y estos motores se utilizan con frecuencia en el campo de la robótica especializada.
 Motor armónico robótico con encoders de alta precisión y STOEl motor armónico robótico HAG es un actuador de articulación de robot diseñado específicamente para aplicaciones robóticas. El driver integrado está incorporado en la base del motorreductor y está equipado con encoders de alta precisión—resolución de 20 bits en el lado de alta velocidad y de 19 bits en el lado de salida—lo que permite un control totalmente en lazo cerrado. Las funciones opcionales STO y de freno están disponibles para garantizar un funcionamiento más seguro del equipo.Detalles
Motor armónico robótico con encoders de alta precisión y STOEl motor armónico robótico HAG es un actuador de articulación de robot diseñado específicamente para aplicaciones robóticas. El driver integrado está incorporado en la base del motorreductor y está equipado con encoders de alta precisión—resolución de 20 bits en el lado de alta velocidad y de 19 bits en el lado de salida—lo que permite un control totalmente en lazo cerrado. Las funciones opcionales STO y de freno están disponibles para garantizar un funcionamiento más seguro del equipo.Detalles Módulo de articulación armónica humano-robot con sensor de par y conector de cable integradoEl módulo de articulación armónica TCHL es un módulo de articulación armónica que integra directamente un sensor de par en el reductor de accionamiento armónico. El sensor de par permite una medición precisa del estado operativo del sistema de accionamiento y los valores de par requeridos, lo que posibilita una detección precisa de la carga del actuador. Esto ayuda a prevenir sobrecargas y permite una interacción más segura entre humanos y robots.
Módulo de articulación armónica humano-robot con sensor de par y conector de cable integradoEl módulo de articulación armónica TCHL es un módulo de articulación armónica que integra directamente un sensor de par en el reductor de accionamiento armónico. El sensor de par permite una medición precisa del estado operativo del sistema de accionamiento y los valores de par requeridos, lo que posibilita una detección precisa de la carga del actuador. Esto ayuda a prevenir sobrecargas y permite una interacción más segura entre humanos y robots.
El módulo cuenta con cables y conectores totalmente integrados, lo que permite conexiones rápidas y precisas de los componentes y posibilita un control de movimiento seguro y receptivo gracias a un diseño altamente integrado.Detalles Módulo de articulación rotatoria armónica tipo T para brazo de robot CobotsEl módulo de articulación armónica tipo T es una unidad de articulación robótica altamente integrada que combina un reductor armónico, un motor de par, sensores de precisión, un freno y un controlador. Se denomina "tipo T" porque la brida de salida es perpendicular al eje del motor, formando una disposición en forma de T ideal para articulaciones robóticas giratorias. Diseñado para robots colaborativos, el módulo simplifica el desarrollo al integrar componentes clave en una unidad compacta y lista para usar. Esto acorta considerablemente el ciclo de desarrollo, reduce costos y hace que construir un brazo robótico sea casi tan fácil como ensamblar bloques LEGO. Su alta integración también mejora la eficiencia del mantenimiento y amplía la aplicabilidad de la tecnología de brazos robóticos.Detalles
Módulo de articulación rotatoria armónica tipo T para brazo de robot CobotsEl módulo de articulación armónica tipo T es una unidad de articulación robótica altamente integrada que combina un reductor armónico, un motor de par, sensores de precisión, un freno y un controlador. Se denomina "tipo T" porque la brida de salida es perpendicular al eje del motor, formando una disposición en forma de T ideal para articulaciones robóticas giratorias. Diseñado para robots colaborativos, el módulo simplifica el desarrollo al integrar componentes clave en una unidad compacta y lista para usar. Esto acorta considerablemente el ciclo de desarrollo, reduce costos y hace que construir un brazo robótico sea casi tan fácil como ensamblar bloques LEGO. Su alta integración también mejora la eficiencia del mantenimiento y amplía la aplicabilidad de la tecnología de brazos robóticos.Detalles Módulo de articulación de robot con diseño de sellado para robot especial de operación submarinaEl módulo de articulación logra un volumen y peso altamente optimizados mediante componentes totalmente integrados, incluido el reductor armónico, el motor de par sin marco, el freno, el codificador y el controlador, lo que permite un control de movimiento preciso con mayor par de salida, mayor precisión, tamaño más compacto y peso más ligero. También ofrecemos soluciones personalizadas para cumplir con requisitos específicos para aplicaciones personalizadas y entornos operativos especiales, siendo las personalizaciones más comunes las versiones impermeables (resistentes a salpicaduras de agua, rociados o operación submarina hasta 1 metro de profundidad) y adaptaciones a bajas temperaturas. Este módulo de articulación impermeable está diseñado específicamente para robots especiales que operan bajo el agua, desarrollado como una versión mejorada de nuestro módulo de articulación estándar con mejoras dedicadas para abordar los desafíos de impermeabilización en las articulaciones robóticas.Detalles
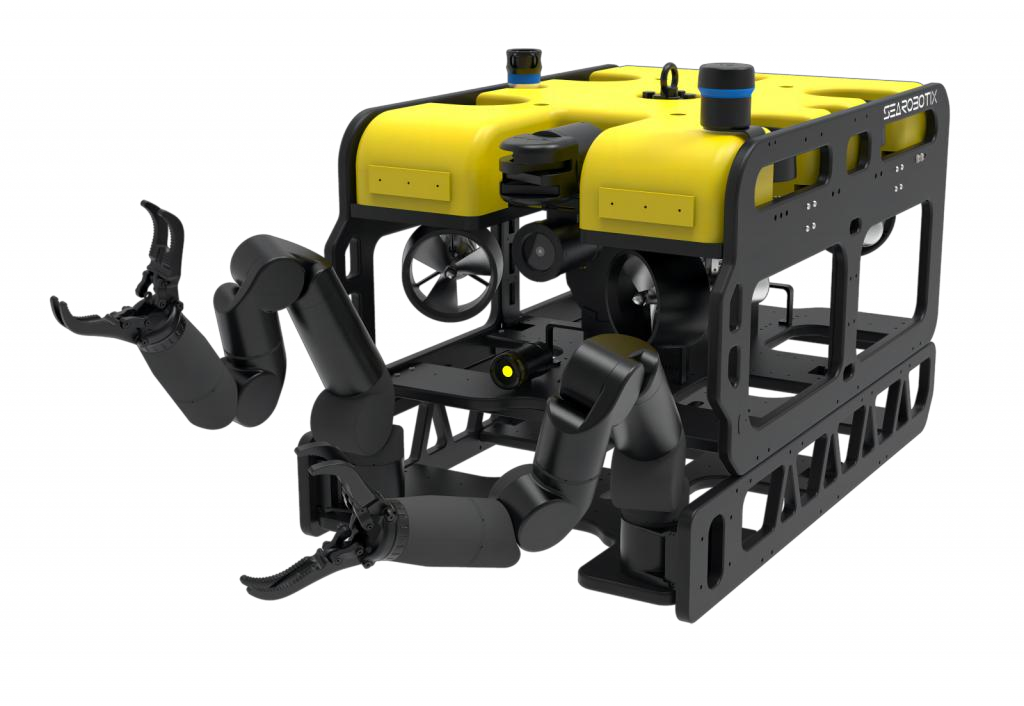
Módulo de articulación de robot con diseño de sellado para robot especial de operación submarinaEl módulo de articulación logra un volumen y peso altamente optimizados mediante componentes totalmente integrados, incluido el reductor armónico, el motor de par sin marco, el freno, el codificador y el controlador, lo que permite un control de movimiento preciso con mayor par de salida, mayor precisión, tamaño más compacto y peso más ligero. También ofrecemos soluciones personalizadas para cumplir con requisitos específicos para aplicaciones personalizadas y entornos operativos especiales, siendo las personalizaciones más comunes las versiones impermeables (resistentes a salpicaduras de agua, rociados o operación submarina hasta 1 metro de profundidad) y adaptaciones a bajas temperaturas. Este módulo de articulación impermeable está diseñado específicamente para robots especiales que operan bajo el agua, desarrollado como una versión mejorada de nuestro módulo de articulación estándar con mejoras dedicadas para abordar los desafíos de impermeabilización en las articulaciones robóticas.Detalles Accionador Rotativo de Transmisión Armónica con Gran Hueco CentralEl accionador rotativo de gran hueco central generalmente integra un motor de par sin marco de rotor interno con componentes como un reductor de transmisión armónica, un codificador absoluto y una unidad de transmisión armónica de gran hueco central personalizada para formar un conjunto completo de accionador rotativo. Su unidad de control (sistema de accionamiento) suele estar montada externamente, lo que permite un control de movimiento de alta precisión para el equipo conectado. En comparación con los accionadores rotativos estándar, esta serie presenta un diámetro de hueco central más grande, permitiendo el paso de tornillos de avance, cables y otros componentes. Está diseñado para aplicaciones que requieren un gran espacio de hueco pasante, alta precisión e integración compacta, como mesas rotativas de máquinas herramienta, dispositivos médicos de precisión, sistemas de corte láser de 5 ejes y equipos semiconductores.Detalles
Accionador Rotativo de Transmisión Armónica con Gran Hueco CentralEl accionador rotativo de gran hueco central generalmente integra un motor de par sin marco de rotor interno con componentes como un reductor de transmisión armónica, un codificador absoluto y una unidad de transmisión armónica de gran hueco central personalizada para formar un conjunto completo de accionador rotativo. Su unidad de control (sistema de accionamiento) suele estar montada externamente, lo que permite un control de movimiento de alta precisión para el equipo conectado. En comparación con los accionadores rotativos estándar, esta serie presenta un diámetro de hueco central más grande, permitiendo el paso de tornillos de avance, cables y otros componentes. Está diseñado para aplicaciones que requieren un gran espacio de hueco pasante, alta precisión e integración compacta, como mesas rotativas de máquinas herramienta, dispositivos médicos de precisión, sistemas de corte láser de 5 ejes y equipos semiconductores.Detalles Motor de articulación de robot compacto altamente integrado con accionamiento armónicoEl motor de articulación de robot logra un control de movimiento altamente preciso a través de componentes integrados que incluyen accionamiento armónico, motor de par sin marco, freno, codificador y unidad de accionamiento, con tamaño y peso optimizados. Proporciona mayor par, mayor precisión, tamaño más compacto y peso más ligero. También ofrecemos servicios de personalización según los requisitos específicos de los clientes.
Motor de articulación de robot compacto altamente integrado con accionamiento armónicoEl motor de articulación de robot logra un control de movimiento altamente preciso a través de componentes integrados que incluyen accionamiento armónico, motor de par sin marco, freno, codificador y unidad de accionamiento, con tamaño y peso optimizados. Proporciona mayor par, mayor precisión, tamaño más compacto y peso más ligero. También ofrecemos servicios de personalización según los requisitos específicos de los clientes.
Los motores de articulación de robot suelen admitir un amplio rango de voltaje de DC24V~DC48V. Como componente central en la industria de la robótica, el avance tecnológico de los motores de articulación de robot continuará impulsando el desarrollo de robots especializados y humanoides hacia una mayor flexibilidad y escenarios de aplicación más amplios. Más allá de la robótica, los motores de articulación de robot también se aplican en equipos de semiconductores, equipos fotovoltaicos, equipos médicos de precisión, equipos 3C, equipos ópticos y otros campos.Detalles






Motor de articulación planetario
El motor de articulación planetaria también es un componente central de los sistemas de potencia robóticos. En comparación con los módulos de articulación armónica, presenta una relación de reducción menor, una mayor velocidad de salida y una mayor rigidez, aunque con una precisión de salida general ligeramente inferior. Mediante componentes altamente integrados, incluidos reductores planetarios, motores de par sin bastidor, frenos, encoders y drivers, su tamaño y peso se optimizan significativamente, lo que permite un control preciso del movimiento articular. Esto da como resultado un mayor par, dimensiones más compactas y menor peso. Los motores de articulación planetaria suelen admitir un amplio rango de voltaje, adaptándose a DC 24V~48V de bajo voltaje. También ofrecemos soluciones personalizadas basadas en los requisitos individuales de cada cliente.
 Módulos de articulación planetaria de mayor salida de par y peso ligeroLos módulos de articulación planetaria de la serie PA de HONPINE cuentan con tres patentes exclusivas de invención y siete patentes de modelo de utilidad. Con un ingenioso diseño estructural, ofrecen la mayor salida de par entre los productos de la misma clase, proporcionando un rendimiento potente y estable.
Módulos de articulación planetaria de mayor salida de par y peso ligeroLos módulos de articulación planetaria de la serie PA de HONPINE cuentan con tres patentes exclusivas de invención y siete patentes de modelo de utilidad. Con un ingenioso diseño estructural, ofrecen la mayor salida de par entre los productos de la misma clase, proporcionando un rendimiento potente y estable.
HONPINE proporciona amplios recursos de producto y soporte técnico, lo que permite una rápida implementación en diversos escenarios de aplicación mientras reduce significativamente el tiempo, el esfuerzo y el costo requeridos durante la etapa de investigación preliminar del proyecto.
Los módulos adoptan un diseño de entrada/salida compartida de potencia y señal, simplificando en gran medida la conexión entre las unidades de accionamiento. Combinado con una estructura de cableado pasante hueca, la aplicación y la integración de las unidades de accionamiento se vuelven más convenientes y eficientes.Detalles Módulo de articulación planetaria compacto, ligero, resistente a impactos y de alta velocidadEl Módulo de Articulación Planetaria Estándar es un componente central de los sistemas de potencia robóticos. Mediante un diseño altamente integrado que combina un reductor planetario, un motor de par sin carcasa, freno, codificador y controlador, logra una optimización significativa en volumen y peso, permitiendo un control preciso del movimiento de la articulación. Esto da como resultado mayor par, menor tamaño y menor peso. En comparación con los módulos de articulación armónicos, el módulo de articulación planetaria presenta una relación de reducción menor, mayor velocidad de salida y mayor densidad de par, lo que lo hace más adecuado para aplicaciones de carga media a baja. También proporcionamos servicios de personalización adaptados a los requisitos específicos de los clientes.
Módulo de articulación planetaria compacto, ligero, resistente a impactos y de alta velocidadEl Módulo de Articulación Planetaria Estándar es un componente central de los sistemas de potencia robóticos. Mediante un diseño altamente integrado que combina un reductor planetario, un motor de par sin carcasa, freno, codificador y controlador, logra una optimización significativa en volumen y peso, permitiendo un control preciso del movimiento de la articulación. Esto da como resultado mayor par, menor tamaño y menor peso. En comparación con los módulos de articulación armónicos, el módulo de articulación planetaria presenta una relación de reducción menor, mayor velocidad de salida y mayor densidad de par, lo que lo hace más adecuado para aplicaciones de carga media a baja. También proporcionamos servicios de personalización adaptados a los requisitos específicos de los clientes.
Con ventajas clave como alto rendimiento a alta velocidad, resistencia al impacto y diseño compacto y ligero, el Módulo de Articulación Planetaria Estándar se ha convertido en la solución preferida para accionamientos de alta carga en robots humanoides, robots especializados, AGV logísticos y automatización industrial, impulsando avances en el rendimiento robótico y escenarios de aplicación más amplios.Detalles


Motor de par sin marco
El motor de par sin bastidor, un tipo especializado de motor síncrono de imanes permanentes (PMSM), consta de dos componentes centrales: el rotor y el estator, eliminando al mismo tiempo las estructuras tradicionales del motor, como carcasas, rodamientos y ejes. Diseñado para integrarse directamente en el sistema mecánico del cliente, requiere que el usuario final proporcione los rodamientos de soporte y las carcasas. Esta filosofía de diseño ofrece mayor flexibilidad, dimensiones más compactas y un rendimiento superior, lo que lo hace ideal para aplicaciones con exigencias estrictas de espacio, peso y capacidades dinámicas. Destaca en escenarios de alta precisión y alta respuesta dinámica, incluida la actuación de articulaciones de robots humanoides, mesas rotativas de precisión, equipos médicos y sistemas de automatización industrial.Los motores de par sin bastidor se subcategorizaron además en motores sin bastidor de rotor interno y motores sin bastidor de rotor externo, según su configuración estructural.
 FMK Motores de par sin carcasa altamente integrados para articulaciones de robotsLos motores de par sin carcasa, a diferencia de los servomotores tradicionales, constan únicamente de componentes de estator y rotor. En comparación con los motores con carcasa, los motores sin carcasa ofrecen una configuración flexible y una instalación sencilla. Teniendo en cuenta la creciente tendencia de los sistemas de accionamiento altamente integrados, los motores sin carcasa satisfacen mejor las expectativas de los ingenieros. Los ingenieros ya no necesitan considerar las interfaces del motor en el diseño del sistema, lo que permite reducir al máximo el espacio ocupado por la unidad de salida de potencia en el sistema de accionamiento, logrando una mayor integración del sistema. Los motores de par sin carcasa FMK de HONPINE ahora se utilizan ampliamente en las articulaciones J1–J6 de robots colaborativos y de dos brazos, las articulaciones de marcha de robots cuadrúpedos y las articulaciones flexibles de robots humanoides.Detalles
FMK Motores de par sin carcasa altamente integrados para articulaciones de robotsLos motores de par sin carcasa, a diferencia de los servomotores tradicionales, constan únicamente de componentes de estator y rotor. En comparación con los motores con carcasa, los motores sin carcasa ofrecen una configuración flexible y una instalación sencilla. Teniendo en cuenta la creciente tendencia de los sistemas de accionamiento altamente integrados, los motores sin carcasa satisfacen mejor las expectativas de los ingenieros. Los ingenieros ya no necesitan considerar las interfaces del motor en el diseño del sistema, lo que permite reducir al máximo el espacio ocupado por la unidad de salida de potencia en el sistema de accionamiento, logrando una mayor integración del sistema. Los motores de par sin carcasa FMK de HONPINE ahora se utilizan ampliamente en las articulaciones J1–J6 de robots colaborativos y de dos brazos, las articulaciones de marcha de robots cuadrúpedos y las articulaciones flexibles de robots humanoides.Detalles Motor de par sin carcasa de rotor externo de alta densidad de par y respuesta dinámicaEl motor de par sin carcasa de rotor externo es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. A diferencia de los diseños tradicionales de rotor interno, este motor presenta un rotor montado externamente y un estator posicionado internamente. El diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor, ubicado fuera del estator, integra imanes permanentes con la carcasa exterior y se incrusta directamente en la estructura de carga. El estator, posicionado internamente, contiene devanados de cobre y láminas, impulsando la rotación del rotor externo mediante fuerzas electromagnéticas. Este diseño combina el alto momento de inercia de la configuración de rotor externo con la compacidad de la estructura sin carcasa, lo que lo hace ideal para aplicaciones que requieren salida de par alto a baja velocidad y disipación de calor eficiente, como equipos médicos, ventiladores industriales y sistemas industriales automatizados.Detalles
Motor de par sin carcasa de rotor externo de alta densidad de par y respuesta dinámicaEl motor de par sin carcasa de rotor externo es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. A diferencia de los diseños tradicionales de rotor interno, este motor presenta un rotor montado externamente y un estator posicionado internamente. El diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor, ubicado fuera del estator, integra imanes permanentes con la carcasa exterior y se incrusta directamente en la estructura de carga. El estator, posicionado internamente, contiene devanados de cobre y láminas, impulsando la rotación del rotor externo mediante fuerzas electromagnéticas. Este diseño combina el alto momento de inercia de la configuración de rotor externo con la compacidad de la estructura sin carcasa, lo que lo hace ideal para aplicaciones que requieren salida de par alto a baja velocidad y disipación de calor eficiente, como equipos médicos, ventiladores industriales y sistemas industriales automatizados.Detalles Motor de par sin carcasa de rotor interno compacto y ligero con alta densidad de potenciaEl motor de par sin carcasa de rotor interno es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. El rotor está posicionado internamente, mientras que el estator está montado externamente. Su diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor generalmente adopta una estructura anular integrada con imanes permanentes, montada directamente en el eje de carga. El estator consta de devanados de cobre y láminas, generando fuerzas electromagnéticas para impulsar la rotación del rotor. Esta configuración logra la salida de par mediante una interacción eficiente del campo magnético, lo que lo hace ideal para aplicaciones de alta precisión, como articulaciones robóticas y automatización industrial. Permite accionar cargas directamente, minimizando las pérdidas por transmisión mecánica.Detalles
Motor de par sin carcasa de rotor interno compacto y ligero con alta densidad de potenciaEl motor de par sin carcasa de rotor interno es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. El rotor está posicionado internamente, mientras que el estator está montado externamente. Su diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor generalmente adopta una estructura anular integrada con imanes permanentes, montada directamente en el eje de carga. El estator consta de devanados de cobre y láminas, generando fuerzas electromagnéticas para impulsar la rotación del rotor. Esta configuración logra la salida de par mediante una interacción eficiente del campo magnético, lo que lo hace ideal para aplicaciones de alta precisión, como articulaciones robóticas y automatización industrial. Permite accionar cargas directamente, minimizando las pérdidas por transmisión mecánica.Detalles



¿Qué es un motor de articulación robótica con harmonic drive?
El motor de articulación armónica logra un control de movimiento de alta precisión mediante componentes integrados que incluyen harmonic drive, motor de par sin bastidor, freno, encoder y unidad de accionamiento, con tamaño y peso optimizados.El motor de articulación armónica de HONPINE ofrece opciones de configuración flexibles para satisfacer diversas necesidades de aplicación, incluidos encoders duales, STO (Safe Torque Off), frenos de retención y sensores de par integrados.

Selección de actuador de articulación robótica con Harmonic Drive
Para satisfacer las diversas demandas del mercado, los motores de articulación robótica con harmonic drive de HONPINE se dividen actualmente en tres series principales: HPJM, TCHL y HAG.
Esta guía proporciona una visión general inicial para ayudarle a seleccionar el actuador más adecuado para su aplicación en función de factores como el control de costos, el plazo de entrega y los requisitos básicos de rendimiento.
Para una selección detallada y soporte técnico, no dude en ponerse en contacto con nosotros para seguir conversando.
Características clave
Esta serie lleva más de 5 años en el mercado y ofrece una solución de articulación para robots humanoides totalmente desarrollada y madura. Integra un reductor armónico, driver, encoder y motor de par sin bastidor. Hay disponibles opciones de encoder dual y freno. Admite protocolos de comunicación CAN (propietario), CANopen y EtherCAT.
Ventajas clave
Diseño altamente compacto, que permite más espacio para la integración del sistema bajo requisitos de rendimiento equivalentes
Grasa opcional de baja temperatura, adecuada para entornos severos de hasta -40°C
Plazo de entrega promedio ≤ 4 semanas, lo que garantiza una sólida capacidad de producción
Aplicaciones
Ideal para proyectos que requieren un rendimiento estable y confiable, entrega rápida por lotes u operación en entornos de baja temperatura.
Notas
Esta serie no fue diseñada originalmente con sensores de par ni impermeabilización. La personalización está disponible si se requieren estas características, pero debe esperarse un costo adicional y un plazo de entrega más largo.
Características clave
Esta nueva serie, que se lanzará a finales de 2025, adopta un reductor armónico de desarrollo propio, lo que permite un mejor control de costos. Viene de serie con encoders duales (absoluto de una sola vuelta, resolución de 23-bit) y admite protocolos de comunicación CAN FD y EtherCAT. Las funciones opcionales incluyen freno y sensor de par. El mazo de terminales integrado admite tendido de cables a través de eje hueco y conexión en cascada de módulos.
Ventajas clave
Ventaja significativa en costos
Admite configuraciones de montaje frontal, lateral y trasero, ofreciendo alta flexibilidad estructural
El diseño del mazo facilita una integración sencilla del sistema
Aplicaciones
Ideal para proyectos sensibles al costo con altos requisitos de flexibilidad de instalación.
Notas
Actualmente, solo está disponible una relación de engranajes de 101. Se espera que la gama completa de relaciones de engranajes se lance en June de 2026. El plazo de entrega actual es de aproximadamente 6 semanas.
Características clave
Lanzada en 2026, esta nueva serie está equipada con funcionalidad STO (Safe Torque Off) para cumplir requisitos de seguridad específicos. Adopta reductores armónicos de marcas nacionales líderes, lo que garantiza una alta confiabilidad del producto. Admite protocolos de comunicación CANopen y EtherCAT, con freno y sensor de par opcionales.
Ventajas clave
Cumple estándares de seguridad más altos
Excelente rendimiento y calidad confiable de los componentes centrales del reductor
Aplicaciones
Ideal para proyectos con requisitos de seguridad claros o donde la confiabilidad del reductor es una prioridad máxima.
Notas
Como serie recién lanzada, la capacidad de producción aún está aumentando. El plazo de entrega actual es de aproximadamente 8–10 semanas.
Soluciones y aplicaciones de motores de articulación robótica
Durante muchos años, HONPINE ha aplicado motores de articulación robótica armónica y motores de articulación planetaria en diversos campos, incluidos robots humanoides, robots de doble brazo, robots con ruedas, drones, maquinaria agrícola, equipos nucleares, robots industriales y equipos de automatización industrial, proporcionando soluciones de motores de articulación y admitiendo personalización para estas industrias. Sus series HPJM, TCHL, HAG y otras series de motores de articulación robótica se desarrollan sobre la base de la experiencia obtenida en el servicio práctico.
‹







›

¿Cuáles son las ventajas y desventajas del motor de articulación armónica?
Ventajas de los motores de articulación armónica
Precisión ultraalta
Holgura de transmisión mínima con una precisión de posicionamiento repetitivo de hasta ±0.01 mm, lo que lo hace esencial para operaciones robóticas precisas.
Alta relación de reducción
Una gran relación de reducción de una sola etapa permite una alta salida de par a partir de un tamaño compacto, logrando un rendimiento eficaz de “baja velocidad, alta carga”.

Diseño extremadamente compacto
Estructura simple, tamaño pequeño y construcción ligera, lo que lo hace muy adecuado para partes robóticas con limitación de espacio, como muñecas y manos.
Alta capacidad de integración
A menudo se vende como módulos integrados que combinan motores, encoders y otros componentes, lo que permite una instalación y mantenimiento convenientes al tiempo que admite diseño modular.
Desventajas de los motores de articulación armónica
El reductor armónico y el sensor de par del motor de articulación armónica son desarrollados a medida, lo que dificulta reducir el precio. Sin embargo, en un futuro próximo, cuando la demanda y la capacidad de producción alcancen cierto nivel, el precio podrá reducirse.
Módulo de articulación robótica con Harmonic Drive - Preguntas frecuentes
Los motores de articulación DC armónica de HONPINE son actuadores armónicos diseñados específicamente para la inteligencia incorporada. hpjm fue el primer actuador armónico en lanzarse y actualmente cuenta con el rendimiento más estable y el tiempo de entrega más rápido. Para satisfacer las necesidades de los clientes, recientemente hemos lanzado dos nuevos motores de articulación DC armónica: TCHL y HAG. Contáctenos para obtener los folletos de productos más recientes.
Parámetros principales
Resolución de 16 bits: 65,536 pulsos por revolución del motor.
Relación de transmisión: por ejemplo, 101:1 significa que la salida gira una vez por cada 101 giros del motor.
Velocidad de salida
Velocidad de salida = velocidad del motor ÷ relación de transmisión.
Ejemplo: motor a 1 rev/seg (65,536 pulsos/seg) con una relación 101:1 → la salida completa 1 revolución en 101 segundos.
Conversión de unidades
Conversiones de rad/s:
1 rad/s ≈ 57.3 °/s
1 rad/s ≈ 9.55 rpm
Pulsos/s ↔ rpm (codificador de 16 bits):
1 rpm ≈ 1092.27 pulsos/s
1 pulso/s ≈ 1/1092.27 rpm
Nota: Los cálculos se basan en relaciones físicas. Por ejemplo, 1 rad/s = 60/(2π) rpm.
Nuestros módulos de accionamiento armónico cuentan con una resolución de codificador de alta precisión de 16 bits, lo que proporciona 65,536 posiciones discretas por revolución. Esto significa que la rotación completa de 360° se divide en incrementos extremadamente finos para una precisión posicional excepcional en el extremo del motor.
Los módulos de accionamiento armónico HPJM utilizan un enfoque de seguridad diferente. En lugar de STO, incorporamos un sistema de freno electromagnético integrado confiable que se activa automáticamente para detener la rotación inmediatamente cuando se desconecta la alimentación, garantizando una operación segura.
El nuevo motor de articulación robótica de accionamiento armónico HONPINE HAG 2026 cuenta con una función STO. Contáctenos para obtener más información sobre la serie HAG.
Si bien los módulos estándar de articulación de robot de HONPINE no incluyen medición de par integrada, podemos adaptarnos a los requisitos de detección de par integrando un sensor de par externo. Comuníquese con nuestro equipo técnico para soluciones personalizadas.
Debido al diseño altamente compacto de nuestro sistema de accionamiento integrado, los módulos de articulación de robot actuales de HONPINE no incluyen pines de E/S de propósito general. Este diseño optimizado permite un ahorro de espacio óptimo en aplicaciones robóticas.
Las especificaciones mecánicas completas, incluidos la masa y el volumen para todas las variantes de módulos, están disponibles en nuestro folleto de selección de modelos. Descargue el folleto en la sección de recursos o contacte a nuestro equipo de ventas para requisitos dimensionales específicos.
El motor de articulación HONPINE utiliza un codificador magnético con una resolución de 65,536 unidades por revolución.
Sí. Emplea un codificador absoluto multiturno. Sin embargo, debido a un reductor en la salida, se requiere una batería de codificador para retener el conteo de posición multiturno. Se admite personalización, lo que permite la opción de tener el motor con o sin la batería del codificador.
Según el protocolo CAN, un solo motor requiere 0,5 ms para cada transmisión y recepción. Para varios motores, este tiempo se acumula en consecuencia.
Básicamente, un controlador principal puede manejar cuatro módulos. Aunque el ciclo de comunicación normal es de 0,5 ms por transmisión, no mantiene consistentemente este intervalo; por ejemplo, el muestreo de alta frecuencia no es necesario durante estados de alarma o condiciones similares.
Un módulo de articulación armónica logra un control preciso de posición y par para articulaciones de robot mediante la alta relación de reducción (típicamente 50-160:1) y el bajo juego (menos de 1 minuto de arco) del reductor armónico.
Además, el módulo integra codificadores y sensores de par, permitiendo un ajuste de par en tiempo real con una precisión de ±0.1 N·m, lo que lo hace muy adecuado para tareas de ensamblaje flexibles y conformes.
Un módulo de junta armónica soporta el movimiento rotacional de las articulaciones del robot y logra una precisión de posicionamiento repetitivo de hasta ±0.001°.
Proporciona una alta densidad de par (>100 N·m/kg) en un espacio compacto, lo que lo hace ideal para aplicaciones como:
Articulaciones de robots humanoides
Robots de soldadura y manipulación
Maquinaria médica
Equipos de automatización industrial
Sistemas de accionamiento eléctrico
Robots de servicio y otros sistemas robóticos
El diseño de eje hueco permite que los cables, las líneas neumáticas o los cables de señal pasen por el centro, reduciendo el diámetro de la junta y haciendo que el enrutamiento de cables sea más simple y confiable. Esto reduce significativamente la complejidad del cableado y mejora la integración general del sistema en aplicaciones robóticas.
Los motores de articulación armónica HONPINE cuentan con:
Alto par de salida
Alta precisión
Alta relación de reducción
Estructura compacta
Bajo nivel de ruido
Baja vibración
Son especialmente adecuados para articulaciones de brazos robóticos, donde son críticos los requisitos extremadamente altos de precisión, control de fuerza y diseño ligero.
Con la continua expansión de capacidades de fabricación a gran escala y la innovación tecnológica en curso, HONPINE no solo busca ofrecer productos confiables, producibles en masa y rentables, sino también acelerar la industrialización de robots humanoides y robots de inteligencia encarnada.
Motor de articulación planetaria - Preguntas frecuentes
El motor de articulación planetaria JRM es un producto de grado militar de HONPINE, comúnmente utilizado en perros robóticos de alto rendimiento. Actualmente, para la biónica de robots humanoides, el motor de articulación armónica HPJM está a punto de lanzarse, con un diseño más compacto y una cavidad hueca más grande.
Para cumplir con los estrictos requisitos de precisión de la fabricación industrial, el módulo adopta una estructura de reducción de engranajes planetarios helicoidales. Mediante un diseño optimizado de la superficie del diente, el juego entre engranajes se controla dentro de 10 minutos de arco (aproximadamente 0.167°), logrando una precisión de posicionamiento repetitivo de ±12 minutos de arco.
Combinado con una señal de control de alta frecuencia de 3 kHz y un tiempo de respuesta de ≤200 μs, el sistema evita pérdidas de producto causadas por retrasos o errores de posicionamiento, incluso en operaciones a nivel de micras como el ensamblaje de componentes electrónicos de precisión y la soldadura de pestañas de baterías de litio.
Para aplicaciones de carga pesada, el módulo utiliza materiales de engranajes reforzados de grado militar y estructuras de rodamientos. El par máximo alcanza hasta 36 Nm, mientras que el par de bloqueo supera los 24 Nm, equivalente a levantar de manera estable una carga de 3.6 kg. Esto proporciona una potencia fuerte y confiable para la locomoción con carga en robots cuadrúpedos y la rehabilitación asistida en robots exoesqueléticos.
Desde aplicaciones industriales como la clasificación de robots SCARA y la carga y descarga de brazos robóticos de seis ejes, hasta aplicaciones médicas que incluyen equipos de entrenamiento de rehabilitación y control de precisión de robots quirúrgicos, y más allá hasta mercados de consumo como la simulación de marcha de robots biónicos y la estabilización de gimbals para UAV, el módulo admite múltiples protocolos de comunicación, incluidos CAN y RS485, lo que permite una rápida compatibilidad con sistemas de control de diferentes marcas.
Más importante aún, la combinación de un diseño ligero y una alta densidad de par crea una gran versatilidad de aplicación:
Los modelos de tamaño pequeño pueden incrustarse en gimbals para UAV, garantizando una rotación suave de 360° sin aumentar la carga útil.
Los modelos más grandes pueden integrarse en las ruedas motrices de los AGV, soportando una operación continua de 24 horas para satisfacer las demandas de operaciones ininterrumpidas en almacenes y logística.
Los engranajes internos del motor planetario HONPINE están fabricados en acero aleado de alta resistencia, tratados con cementación y temple, logrando una dureza superficial de HRC 58-62. Combinados con grasa lubricante de grado alimenticio, la vida útil supera las 10,000 horas en condiciones de operación nominales, equivalentes a aproximadamente 14 meses de funcionamiento industrial continuo sin reemplazar componentes principales.
Además, el motor cuenta con un diseño de sellado modular con un índice de protección IP65, resistiendo eficazmente el polvo y salpicaduras de líquidos, lo que lo hace adecuado para entornos especiales como procesamiento de alimentos y pintura automotriz.
Las interfaces estandarizadas y el diseño de tapa final desmontable permiten realizar mantenimiento sin desmontar todo el robot—los módulos pueden reemplazarse directamente, reduciendo significativamente el tiempo de inactividad y los costos de mantenimiento.
Con las ventajas inherentes de los reductores de engranajes planetarios, los motores reductores planetarios HONPINE se utilizan ampliamente en diversos campos de la robótica.
En robots cuadrúpedos, cumplen con los requisitos de 12 grados de libertad, proporcionando un accionamiento estable y potente para moverse en terrenos complejos.
En brazos robóticos, el reductor planetario de alta precisión garantiza un posicionamiento preciso, permitiendo tareas complejas como soldadura y corte.
En robots humanoides, los reductores planetarios ayudan a lograr movimientos más naturales y fluidos, mejorando significativamente la coordinación y estabilidad en acciones como caminar, levantar brazos y transiciones de postura.
Actuadores de transmisión armónica para robots humanoides- Preguntas frecuentes
Estas son algunas de las preguntas técnicas y de compra más comunes que hacen los clientes al evaluar módulos de articulación y sistemas de actuadores para robots humanoides. Los temas incluyen selección de par, relaciones de reducción, control de movimiento, protocolos de comunicación, gestión térmica, rendimiento de caminata dinámica e integración con plataformas de robots humanoides.
Esta guía está destinada a ayudar a ingenieros, desarrolladores de robótica y equipos de compras a comprender mejor cómo seleccionar soluciones de articulación adecuadas para diferentes tamaños de robots humanoides, requisitos de carga útil y escenarios de aplicación.
Para más soluciones de robots humanoides, póngase en contacto con honpine
Para cumplir con los estrictos requisitos de precisión de la fabricación industrial, el módulo adopta una estructura de reducción de engranajes planetarios helicoidales. Mediante un diseño optimizado de la superficie del diente, el juego entre engranajes se controla dentro de 10 minutos de arco (aproximadamente 0.167°), logrando una precisión de posicionamiento repetitivo de ±12 minutos de arco.
Combinado con una señal de control de alta frecuencia de 3 kHz y un tiempo de respuesta de ≤200 μs, el sistema evita pérdidas de producto causadas por retrasos o errores de posicionamiento, incluso en operaciones a nivel de micras como el ensamblaje de componentes electrónicos de precisión y la soldadura de pestañas de baterías de litio.
Para aplicaciones de carga pesada, el módulo utiliza materiales de engranajes reforzados de grado militar y estructuras de rodamientos. El par máximo alcanza hasta 36 Nm, mientras que el par de bloqueo supera los 24 Nm, equivalente a levantar de manera estable una carga de 3.6 kg. Esto proporciona una potencia fuerte y confiable para la locomoción con carga en robots cuadrúpedos y la rehabilitación asistida en robots exoesqueléticos.
Desde aplicaciones industriales como la clasificación de robots SCARA y la carga y descarga de brazos robóticos de seis ejes, hasta aplicaciones médicas que incluyen equipos de entrenamiento de rehabilitación y control de precisión de robots quirúrgicos, y más allá hasta mercados de consumo como la simulación de marcha de robots biónicos y la estabilización de gimbals para UAV, el módulo admite múltiples protocolos de comunicación, incluidos CAN y RS485, lo que permite una rápida compatibilidad con sistemas de control de diferentes marcas.
Más importante aún, la combinación de un diseño ligero y una alta densidad de par crea una gran versatilidad de aplicación:
Los modelos de tamaño pequeño pueden incrustarse en gimbals para UAV, garantizando una rotación suave de 360° sin aumentar la carga útil.
Los modelos más grandes pueden integrarse en las ruedas motrices de los AGV, soportando una operación continua de 24 horas para satisfacer las demandas de operaciones ininterrumpidas en almacenes y logística.
Los engranajes internos del motor planetario HONPINE están fabricados en acero aleado de alta resistencia, tratados con cementación y temple, logrando una dureza superficial de HRC 58-62. Combinados con grasa lubricante de grado alimenticio, la vida útil supera las 10,000 horas en condiciones de operación nominales, equivalentes a aproximadamente 14 meses de funcionamiento industrial continuo sin reemplazar componentes principales.
Además, el motor cuenta con un diseño de sellado modular con un índice de protección IP65, resistiendo eficazmente el polvo y salpicaduras de líquidos, lo que lo hace adecuado para entornos especiales como procesamiento de alimentos y pintura automotriz.
Las interfaces estandarizadas y el diseño de tapa final desmontable permiten realizar mantenimiento sin desmontar todo el robot—los módulos pueden reemplazarse directamente, reduciendo significativamente el tiempo de inactividad y los costos de mantenimiento.
Con las ventajas inherentes de los reductores de engranajes planetarios, los motores reductores planetarios HONPINE se utilizan ampliamente en diversos campos de la robótica.
En robots cuadrúpedos, cumplen con los requisitos de 12 grados de libertad, proporcionando un accionamiento estable y potente para moverse en terrenos complejos.
En brazos robóticos, el reductor planetario de alta precisión garantiza un posicionamiento preciso, permitiendo tareas complejas como soldadura y corte.
En robots humanoides, los reductores planetarios ayudan a lograr movimientos más naturales y fluidos, mejorando significativamente la coordinación y estabilidad en acciones como caminar, levantar brazos y transiciones de postura.
Precauciones para el uso de módulos de articulación robótica
Para obtener más información sobre asuntos de preventa y posventa relacionados con los módulos de articulación, póngase en contacto con nosotros. HONPINE proporcionará soporte técnico individual.
● Operación segura:No conecte ni desconecte cables mientras el equipo esté encendido. Antes de desconectar los condensadores, asegúrese de que estén completamente descargados.
● Instalación del equipo: Confirme que la estructura de instalación tenga suficiente resistencia mecánica para soportar el peso de la articulación integrada y garantizar un montaje seguro.
● Apriete de tornillos: Cuando apriete tornillos entre el motor y los componentes estructurales, se deben utilizar adhesivo fijador de roscas y una llave dinamométrica. Siga estrictamente las especificaciones de par proporcionadas en el manual del motor.
● Normas de cableado: Realice el cableado estrictamente de acuerdo con la definición de pines. No se base en los colores de los cables para la identificación, y asegúrese de que la adaptación de resistencia sea correcta.
● Uso de la fuente de alimentación: Verifique que el voltaje de la fuente de alimentación coincida con el voltaje nominal de la articulación integrada. Cuando los usuarios conectan baterías externas de litio, si el voltaje nominal es 48V, el voltaje de la batería completamente cargada puede superar 60V durante el arranque, lo que podría afectar el funcionamiento del motor o incluso dañarlo. Las medidas preventivas incluyen la instalación de condensadores electrolíticos para suavizar el voltaje o la conexión en serie de un módulo regulador de voltaje con la entrada de alimentación del motor para estabilizar el voltaje de suministro.
● Sistemas de alimentación por batería: En los sistemas alimentados por batería, la propia batería puede absorber la corriente inversa y ayudar a evitar que el voltaje supere el límite nominal.
● Sistemas de alimentación conmutada: En los sistemas de alimentación conmutada, el motor integrado puede generar energía regenerativa durante una desaceleración rápida o cuando es accionado por cargas gravitacionales, provocando que el voltaje del bus de CC aumente y potencialmente active alarmas de sobretensión. Para evitarlo, se recomienda instalar condensadores electrolíticos de gran capacidad en paralelo o añadir resistencias de frenado para reducir los picos de voltaje.
● Evite descargas eléctricas y lesiones por aplastamiento: Cuando el motor esté encendido, en funcionamiento o conectado a componentes estructurales, nunca toque el motor directamente con la mano para evitar descargas eléctricas o lesiones por aplastamiento causadas por estructuras en movimiento.
● Desmontaje del motor: Está prohibido desmontar el motor sin autorización. El desmontaje solo está permitido en circunstancias especiales, tras consulta y bajo orientación profesional. El desmontaje no autorizado anulará la garantía.
● Transporte después del desmontaje: Si el motor se desmonta bajo orientación y necesita ser devuelto, asegúrese de que todos los tornillos originales estén correctamente reinstalados y asegurados antes del envío para evitar daños durante el transporte causados por vibración o impacto, incluidos los tornillos del reductor, los tornillos de la tapa trasera y otros componentes de fijación.
Tendencias de la industria
- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Reductores RV de alta precisión perfectamente adaptados para robots caminantes
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama





Tendencias de la industria
- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Reductores RV de alta precisión perfectamente adaptados para robots caminantes
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama
